






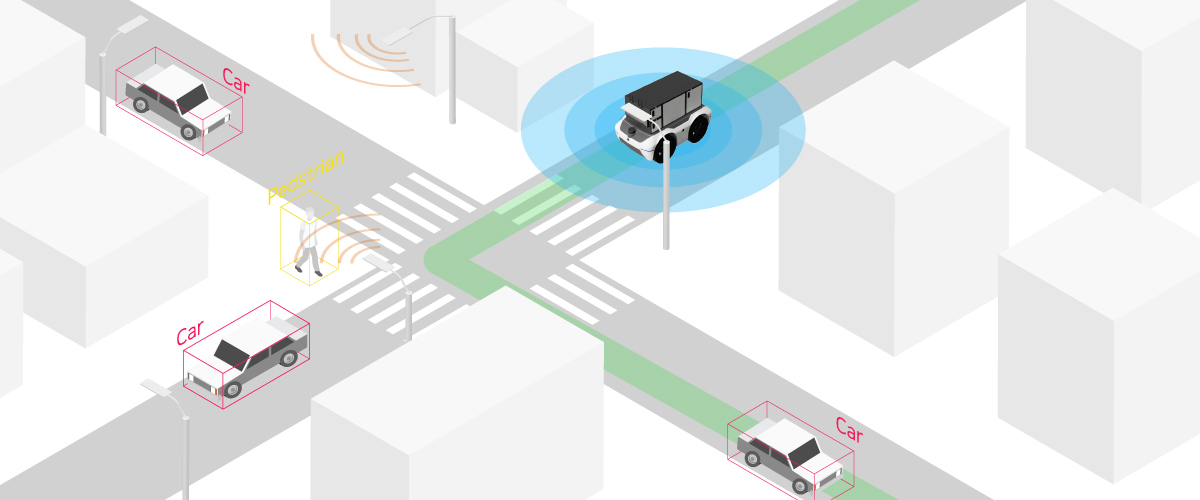
uDrive는 Level 3 이상의 자율주행 시스템 구현이 가능한 언맨드솔루션의 자율주행 알고리즘으로 외부 주행환경 인식시스템, 판단/주행전략 시스템으로 구성되어 있습니다. 자율주행 이동체 (국토교통부, A형 / B형 / C형 자율주행 자동차)에 대해 다양한 적용 및 실증을 진행하고 있으며, 알고리즘 고도화를 위해 협력 및 공동개발하고 있습니다.
시스템 구성
uDrive 1.4.1.x의 자율주행 시스템은 Perception 시스템과 Planning 시스템으로 구성됩니다.
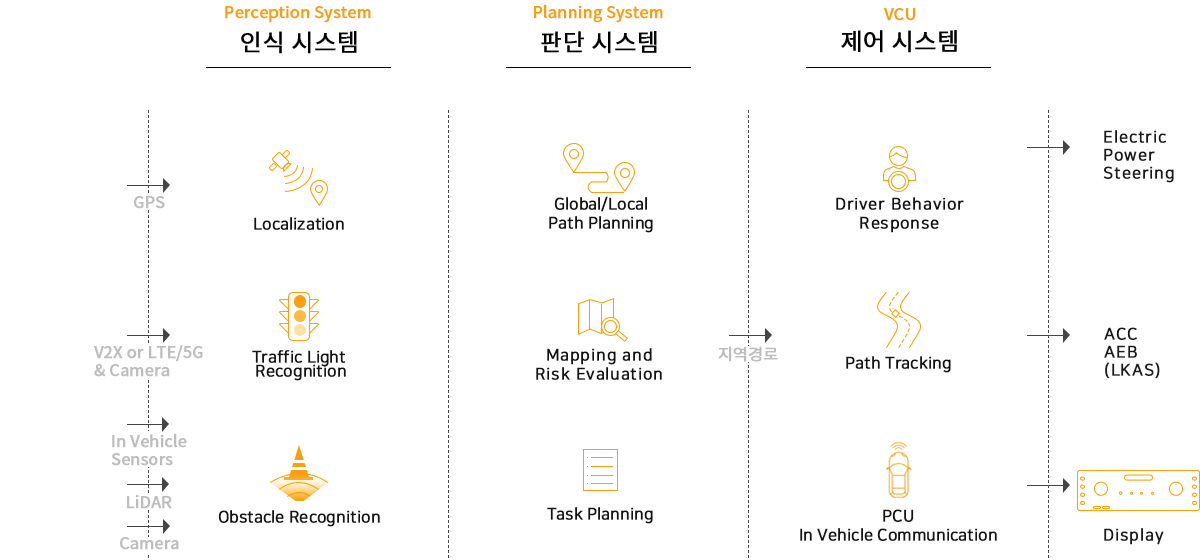
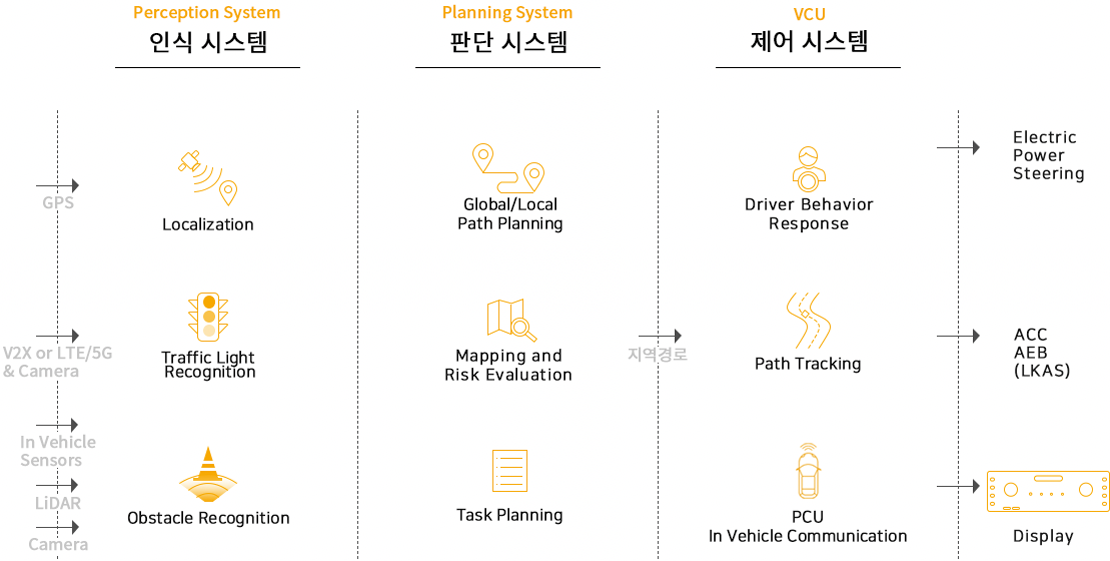
* 운영 환경 및 도로 상황에 따라 센서 구성은 변경됩니다.
주행모드
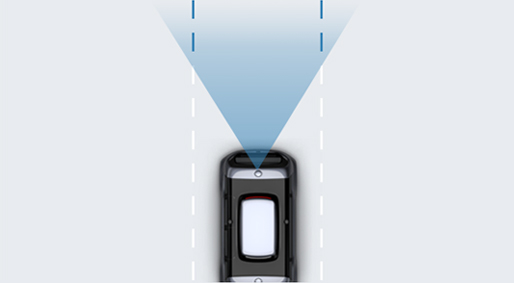
차로유지모드
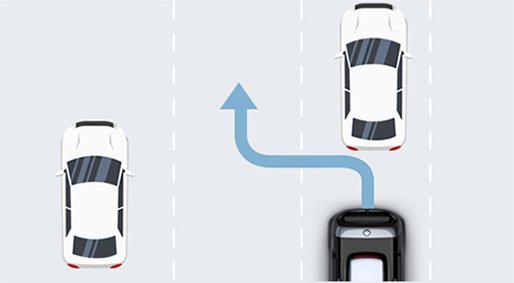
차로변경모드

Cut-In / Cut-Out 모드

정체상황 추종 및 해제 모드 (ACC)

전방충돌방지 모드 (AEB)

신호등인식 및 대응 (OBU, Camera)
주행모드
차로유지모드
차로변경모드
Cut-In / Cut-Out 모드
정체상황 추종 및 해제 모드 (ACC)
전방충돌방지 모드 (AEB)
신호등인식 및 대응 (OBU, Camera)
센서 구성
uDrive 1.4.1.x 센서구성
- 자율주행시스템 구성장치명
- 장착 수량
- 구성장치의 용도
-
- LiDAR
- 6
- 전후방 장애물 검출
-
- GPS/IMU
- 1
- 차량 위치 및 헤딩 인식
-
- Controller
- 1
- LiDAR데이터 처리, 장애물 검출 + 상황 판단
-
- Camera
- 4
- 전후방 상황인식
* 운영 환경 및 도로상황에 따라 센서 구성은 변경됩니다.