







Autonomous Platform
언맨드솔루션 자율주행의 근본적인 핵심 기술은 자율주행 자동차를 개발하면서 시작되었습니다.
자율주행 관련 하드웨어/소프트웨어 기술을 모두 보유함으로써 다양한 커스텀마이징 제품개발이 가능하며 자율주행자동차에 최적화된 센서 장착 및 융합 알고리즘 등의 센서 솔루션을 보유하고 있습니다.
Automotive Area
완전 자율주행자동차는 차량제어시스템, 환경인식시스템, 통합컨트롤시스템 크게 3가지 부분으로 나눌 수 있습니다. 자율주행 자동차의 필수 제어 요소인 조향, 가속, 감속, 변속에 대한 기계식 제어 액추에이터 및 전자 제어 모듈까지 모두 언맨드솔루션만의 고유 기술로 개발되었습니다.
차량제어시스템은 언맨드솔루션만의 기술로 개발된 엑추에이터와 제어모듈을 이용하여 차량을 제어합니다.
환경인식시스템에서는 기존의 상용센서를 이용한 고정밀 위치 측위기술, 다양한 장애물 인식 기술 등 언맨드솔루션만의 독자적인 센서융합기술을 가지고 있습니다.
통합컨트롤시스템은 차량 제어기술과 센서 데이터를 융합하여 자율주행자동차가 가장 효율적인 경로를 생성하고 추종할 수 있도록 자율주행 알고리즘이 탑재되어 있습니다.
또한 언맨드솔루션은 완전 자율주행 기술의 일부분이 되는 부분 자율주행 기술로 라이다 센서 기반의 장애물 인지를 이용한 AEB, FCW 기술과 카메라 센서 기반의 차선인식을 이용한 APAS, LKAS 기술을 보유하고 있습니다.




Drive By Wire Kit




-
제어 액추에이터는 기계식의 제어방식으로 모터와 같은 엑추에이터를 이용하여 기어 레버 또는 브레이크 페달 등을 직접 눌러주어 제어하는 방식입니다.
-
Steering Control (조향제어)
-
-
-
Power Steering + APM
-
APM(Automatic Power-steering Module)
-
Shift Control (변속제어)
-
-
-
Shift Actuator + AGM
-
AGM(Automatic Gear-sift Module)
-
Accel. & Brake Control
(가감속 제어) -
-
-
Accelerator Actuator + ASM + Brake Actuator
-
ASM(Automatic Speed control Module)
-
-
제어 모듈은 전자식의 제어방식으로 언맨드솔루션이 개발한 ARM보드를 통하여 조향, 가속, 감속, 변속의 신호를 제어하는 방식입니다.
(자동/수동 모드가 가능한 조향 제어 모듈, 자동/수동 모드가 가능한 가감속 제어 모듈)-
Steering Control (조향제어)
-
-
-
APM(Automatic Power-steering Module)
-
Shift Control (변속제어)
-
-
-
AGM(Automatic Gear-sift Module)
-
Accel. & Brake Control
(가감속 제어) -
-
-
ASM(Automatic Speed control Module)
-










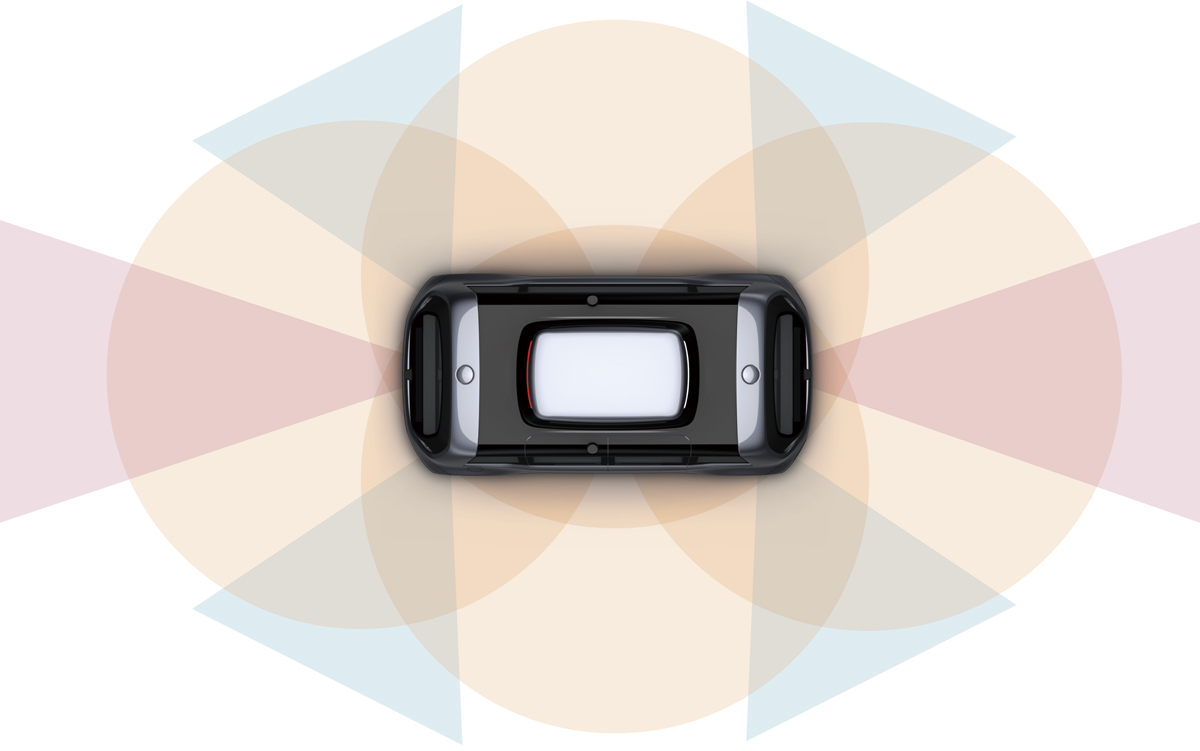
자율주행자동차에는 주변 환경을 인식하고 현재 위치를 검출하기 위하여 다양한 센서가 사용됩니다.
전/후/좌/우의 장애물을 검출하기 위한 RADAR, LiDAR 센서, 전방 차선 및 장애물을 검출하기 위한 Vision 센서, 현재 위치를 실시간 검출하기 위한 GPS 센서는 가장 대표적인 자율주행용 센서입니다.
이러한 다양한 센서를 하나의 자율주행 알고리즘에 사용하기 위해 여러가지의 데이터를 처리하고 융합하는 센서 솔루션을 보유하고 있습니다.
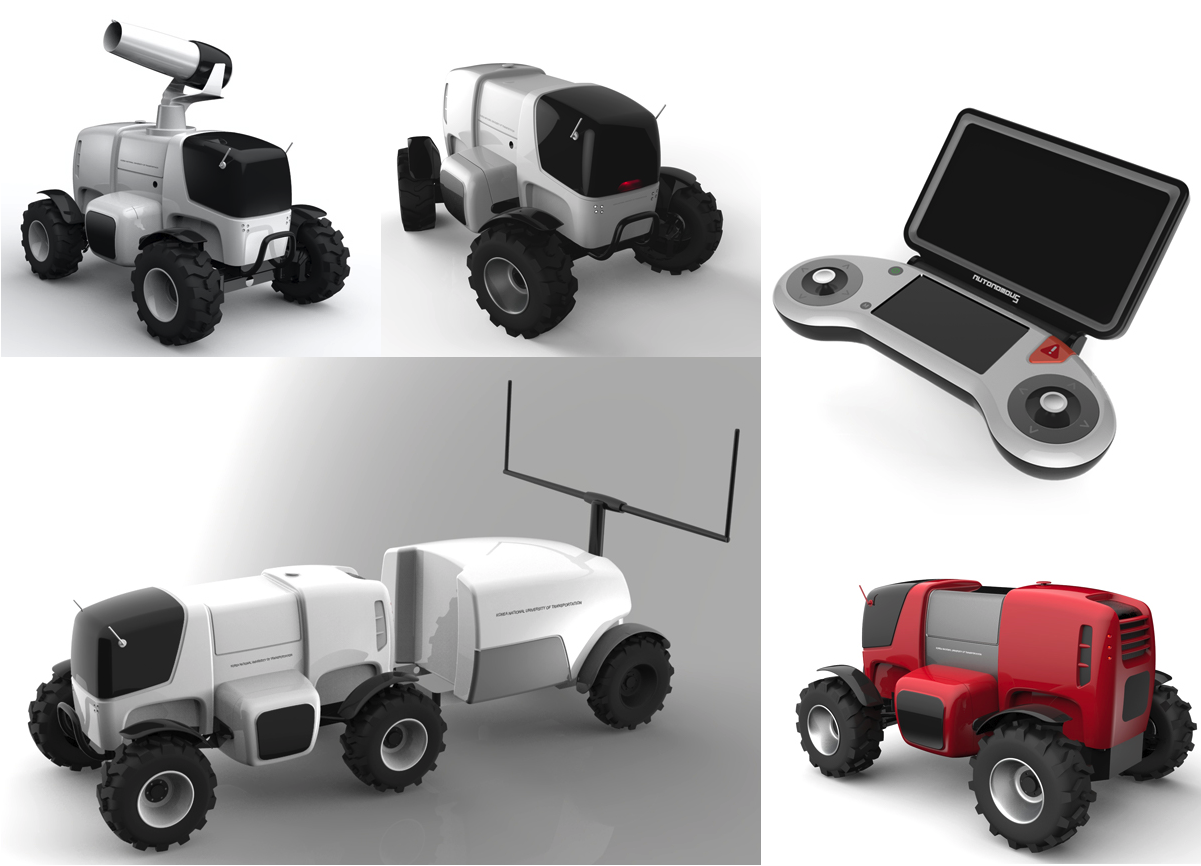
Agriculture Robot
언맨드솔루션은 국내 최초의 자율주행 트랙터를 위한 Auto-Guidance System 개발과 로봇 형태의 자율주행 방제기 개발로 국내 농업기계 첨단화를 선도하고 있습니다.
-

-
GPS-Based
Location
Tracking -
User
Interface
Module -
Low-level
Controller -
Integrated
Control
System -
Path-
Generation
&Following
Simulation -
Vehicle Control
Module System
Integration
-
-

-
GPS-Based
Location
Tracking -
User
Interface
Module -
Low-level
Controller -
Path-
Generation
&Following
Simulation -
Vehicle Control
Module System
Integration
-




언맨드솔루션에서 개발한 트랙터용 EPS는 국내 최초 Auto-Guidance system으로 국내 트랙터에 알맞게 제작하였으며 국내 농촌 환경에 바로 적용할 수 있는 자율주행 알고리즘을 탑재하고 있습니다.
Auto-Guidance System
Auto-Guidance system은 경로계획(desired path)에 따라 위치, 자세, 속도 등의 다양한 차량주행정보를 기준으로 주행 제어기를 통하여 차량의 속도와 조향장치를
효율적으로 구동하며 원하는 경로를 정학하게 추종하기 위하여 차량의 상태정보를 정확하게 측정하어 제어하는 기술입니다.
GPS
Module


High precision positioning
Auto
Steering

Steering
control
Control
Consol

Path creation &
task settings





자율주행 방제기는 (기존 정형화된 논밭환경에서 구동되는 자율주행 트랙터와는 달리) 비정형적인 과수원 환경에서 운용이 가능하도록 개발 중입니다.
비정형환경에서의 구동에 최적화된 플랫폼 개발과 자율주행 알고리즘, 효율적인 자동방제 작업을 위한 지능형 방제시스템 등 자율주행 방제기만의 자율주행 솔루션을 개발하고 있습니다.






ERP Series
언맨드솔루션은 2011년부터 자율주행 기술 교육을 위한 차량형 교육용 플랫폼 개발 및 교육사업을 진행하고 있습니다. 또한 국내 자율주행 경진대회 후원을 진행하고 있으며 자율주행 경진대회 참가팀을 대상으로 자율주행 기술 교육을 진행하고 있습니다.
ERP42는 Education Robot Platform의 약어로 실제 차량과 유사한 구동, 조향, 제동시스템을 가지고 있어 실제 차량 플랫폼을 대체하여 학생 및 연구원들이 쉽게 차량 제어 및 센서 융합, 자율주행 알고리즘 등을 테스트할 수 있는 차량형 교육용 플랫폼입니다.
ERP42 Series는 지속적인 성능 개량 및 시스템 변화, 다양한 소비자의 니즈를 반영하여 실제 차량과 유사한 크기의 ERP42 Ver3와 Mini 사이즈인 2가지 형태로 판매 하고 있습니다.

ERP42 V3.0은 후륜 구동과 전륜 조향이 가능하며 실제 차량과 유사한 구동, 조향과 제동시스템을 갖고 있습니다.
ERP42 V3.0은 사용자가 원하는 목적에 맞게 센서를 선택하고 쉽게 장착할 수 있도록 설계되어 있어 커스터마이즈가 가능합니다.

DETAILS
-
제원DIMENSIONS

- 전장 x 전폭 x 전고 (mm)
- 무게 (kg)
- 2,020 x 1,160 x 550
- 200
-
휠 타이어WHEEL SIZE
- 13 Inch (175/60R13)
-
드라이브 모터DRIVE MOTOR
- 3kW, AC Motor
-
배터리BATTERY
- 배터리 타입
- 배터리 용량
- 운용시간
- Li-ion
- 48V-40Ah (1,900Wh)
- MAX. 3시간(충전시간 : 3시간)
-
최대 속도SPEED
- MAX. 40km/h
-
원격조종REMOTE CONTROL
- 송수신 채널
- 2.4GHz 송신주파수 대역
- 운용거리
- 12ch
- 600m
-
플랫폼 컨트롤러PLATFORM
- Main MCU
- Input / Output power
- Serial
- Communication interface
- CAN / DIO / Encoder Input
- 32Bit RISC MCU
- 12V / 5 V
- RS232, RS485
ERP42 Mini는 다양한 크기의 자율주행플랫폼을 요구하는 소비자를 대응하기 위하여 만든 ERP42 V3.0의 축소 모델입니다.
ERP42 Mini는 자율주행차량 개발에 활용되는 LiDAR 센서와 카메라, GPS 등 다양한 센서의 장착이 가능합니다.

DETAILS
-
제원DIMENSIONS
- 전장 x 전폭 x 전고 (mm)
- Height (mm)
- 휠 베이스 (mm)
- 무게 (kg)
- 844 x 501 x 308
- 69
- 552
- 13.8
-
타입TYPE
- 4WD, Buggy
-
타이어TIRE
- Maxxis Creepy Crawler
-
배터리BATTERY
- 배터리 타입
- 배터리 용량
- 운용시간
- Li-ion
- 22.2V - 6,000mAh (133Wh)
- 약 1시간
-
최대 속도SPEED
- MAX. 6km/h
-
적재하중LOADING
- MAX. 5kg
-
원격조종REMOTE CONTROL
- 송수신 채널
- 2.4GHz 송신주파수 대역
- 운용거리
- 6ch
- 150m
-
플랫폼 컨트롤러PLATFORM
- FPGA Processor
- Processor Speed
- Processor Cores
- Nonvolatile memory
- DDR3 memory
- Xilinx Z-7010
- 667MHz
- 2
- 256MB
- 533MHz