









Autonomous Platform
Unmanned Solution’s core technology of self-driving began as we developed self-driving vehicle.
The development of various customizing products is feasible by possessing all hardware and software technology about self-driving and possesses sensor solution such as the optimized sensor to self-driving vehicle and fusion algorithm.
Automotive Area
Full self-driving vehicle can be classified to vehicle controlling system, environmental recognition system and integrated control system.
Mechanical controlling actuator for steering, acceleration and deceleration and transmission that are the essential factors of self-driving vehicle was developed by
Unmanned Solution’s own technology as well as electronics control module.
Vehicle controlling system controls the car using actuator and controlling module developed by Unmanned Solution’s own technology.
Environmental recognition system has contains Unmanned Solution’s own technology sensor fusion technology such as high precision positioning technology using
existing commercial sensor and various obstacle recognition technologies.
The integrated control system has the self-driving algorithm so self-driving vehicle can create the most efficient path and follow it by integrating vehicle controlling technology and sensor data.
Unmanned Solution owns AEB and FCC technologies that use LiDAR sensor-based obstacle recognition and APAS and LKAS technologies that use camera sensor-based lane recognition.

![]()
Velodyne, which is globally famous for its innovative LiDAR Sensor technology, supports automatic driving vehicles, drivers and mapping.
MORE
![]()
It is Delphi that makes Electronically Scanning Radar(ESR) that helps to keep safe as it can detect all short, middle and long distance.
MORE
![]()
It has versatile detecting technology that recognizes object’s distance, traffic lane information and traffic signs with ADAS camera.
MORE
Drive By Wire Kit




-
ontrolling actuator is the method of direct-stepping on transmission lever or break pedal using the actuator like motor in the way of mechanical control.
-
Steering Control
-
-
-
Power Steering + APM
-
APM(Automatic Power-steering Module)
-
Shift Control
-
-
-
Shift Actuator + AGM
-
AGM(Automatic Gear-sift Module)
-
Accel. & Brake Control
-
-
-
Accelerator Actuator + ASM + Brake Actuator
-
ASM(Automatic Speed control Module)
-
-
Controlling module is the method of controlling the signal of steering, acceleration and deceleration through ARM board developed by
Unmanned Solution as the electronic control method.-
Steering Control
-
-
-
APM(Automatic Power-steering Module)
-
Shift Control
-
-
-
AGM(Automatic Gear-sift Module)
-
Accel. & Brake Control
-
-
-
ASM(Automatic Speed control Module)
-










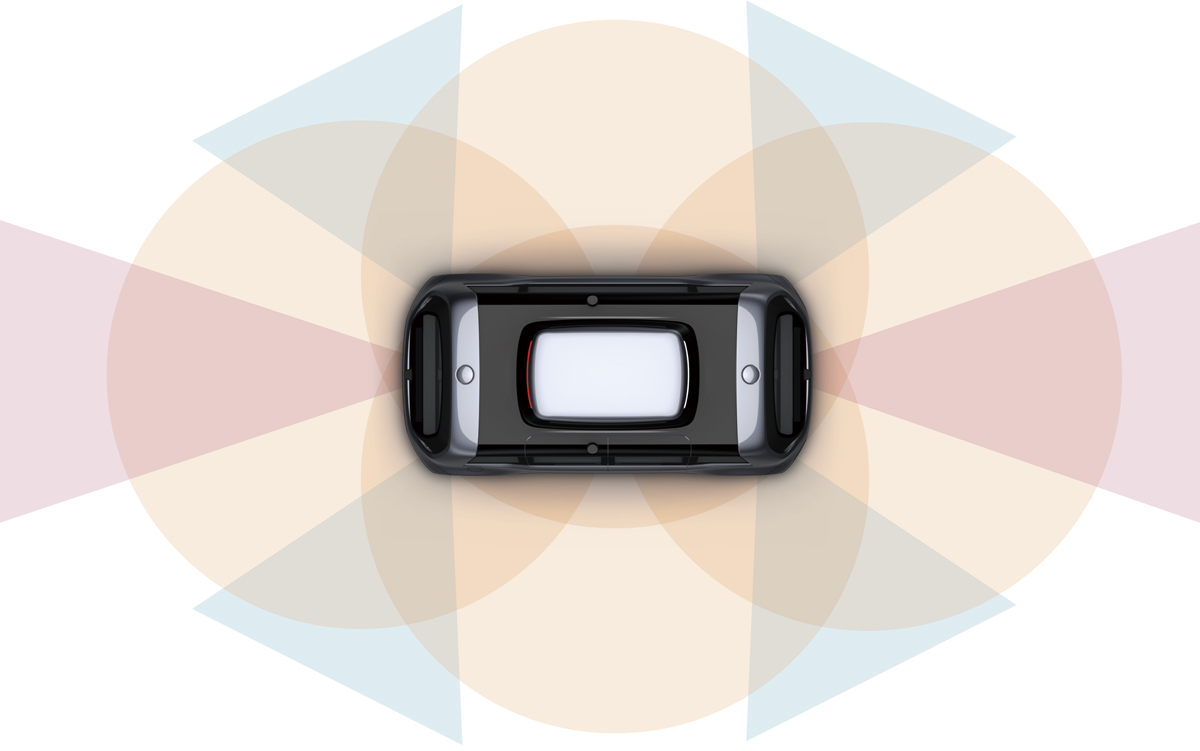
Self-driving vehicle uses the various sensors to recognize surrounding environment and detect current location.
They are the representative sensors for self-driving such as RADAR to detect the obstacles left/right/front/rear, LiDAR sensor, Vision sensor to detect the lane and obstacles ahead and GPS sensor to detect current location in real time.
Unmanned Solution possesses the fusion sensor solution that processes and fuses various data to such variety of sensors into one self-driving algorithm.
Agriculture Robot
Unmanned Solution is leading the modernization of agricultural machine in South Korea with the development of Auto-Guidance System for self-driving tractor first in South Korea and robot-shaped self-driving pesticide applicator.
-

-
GPS-Based
Location
Tracking -
User
Interface
Module -
Low-level
Controller -
Integrated
Control
System -
Path-
Generation
&Following
Simulation -
Vehicle Control
Module System
Integration
-
-

-
GPS-Based
Location
Tracking -
User
Interface
Module -
Low-level
Controller -
Path-
Generation
&Following
Simulation -
Vehicle Control
Module System
Integration
-




EPS for tractor developed by Unmanned Solution is produced suitable for Korean domestic tractor as the first Auto-Guidance system in South Korea and has self-driving algorithm that can be applied to Korean domestic agricultural environment immediately.
Auto-Guidance System
Tractor Auto-Guidance System is the technology that operates the speed of the vehicle and steering device efficiently through driving controller based on various information of driving such as position, attitude and speed along the desired path and controls it by measuring the status information of the vehicle to follow the desired path.
GPS Module


High precision positioning
Auto Steering

Steering control
Control Consol

Path creation &
task settings





Self-driving pesticide applicator is under development so that it can be enabled to be operated in the environment of atypical orchard (not like self-driving operated in the existing formalized environment of rice paddy and field). Unmanned Solution is developing the self-driving pesticide applicator’s own self-driving solution such as the development of platform optimized for the operation in the atypical environment, self-driving algorithm and efficient automatic intelligent pest control.

platform that considers atypical orchard environment
and self-driving system
detachable machine
-based Waypoint driving
recognizing the structure
sensor technology
platform
environment for the workers
incapable remote control





ERP Series
Unmanned Solution has been carrying out the development of educational platform of vehicle type for technical training of self-driving and educational projects since 2011.
And, we have been sponsoring the competition of self-driving in South Korea and performing technical training of self-driving for the teams which participate in the competition.
ERP42 stands for Education Robot Platform and it is the educational platform of vehicle type that the students and researchers can easily test vehicle control, fusion of sensors and self-driving algorithm by replacing real vehicle platform as it have the similar driving, steering and break system to the real one.
ERP42 Series is sold in two types such as ERP42 Ver3 and Mini size by applying continuous performance improvement and various customers’ needs.

ERP42 V3.0 enables rear wheel drive and front wheel steering and has the system of operation, steering and break system similar to real vehicle.
ERP42 V3.0 can be customized as it is designed to enable the users to select the sensor for their own purpose and mount them in the vehicle.

DETAILS
-
DIMENSIONSDIMENSIONS

- Width x Length x height (mm)
- Weight (kg)
- 2,020 x 1,160 x 550
- 200
-
WHEEL SIZEWHEEL SIZE
- 13 Inch (175/60R13)
-
DRIVE MOTORDRIVE MOTOR
- 3kW, AC Motor
-
BATTERYBATTERY
- Type
- Capacity
- Operational time
- Li-ion
- 48V-40Ah (1,900Wh)
- MAX. 3hours(Full charging time : 3hours)
-
SPEEDSPEED
- MAX. 40km/h
-
REMOTE CONTROLREMOTE CONTROL
- Transmit/receive channel
- 2.4GHz Transmit frequency band
- Operational distance
- 12ch
- 600m
-
PLATFORM CONTROLLERPLATFORM
- Main MCU
- Input / Output power
- Serial
- Communication interface
- CAN / DIO / Encoder Input
- 32Bit RISC MCU
- 12V / 5 V
- RS232, RS485
ERP42 Mini is the scaled model of ERP42 V3.0 made to satisfy the customers who need various sizes of self-driving platform.
ERP42 Mini is capable of mounting various kinds of LiDAR sensor, camera and GPS used for development of self-driving vehicle.

DETAILS
-
DIMENSIONSDIMENSIONS
- Width x Length x Height (mm)
- Height (mm)
- Wheel Base (mm)
- Weight (kg)
- 844 x 501 x 308
- 69
- 552
- 13.8
-
TYPETYPE
- 4WD, Buggy
-
TYRETYRE
- Maxxis Creepy Crawler
-
BATTERYBATTERY
- Type
- Capacity
- Operational time
- Li-ion
- 22.2V - 6,000mAh (133Wh)
- 1 hour
-
SPEEDSPEED
- MAX. 6km/h
-
LOADINGLOADING
- MAX. 5kg
-
REMOTE CONTROLREMOTE CONTROL
- Transmit/receive channel
- 2.4GHz Transmit frequency band
- Operational distance
- 6ch
- 150m
-
PLATFORM CONTROLLERPLATFORM
- FPGA Processor
- Processor Speed
- Processor Cores
- Nonvolatile memory
- DDR3 memory
- Xilinx Z-7010
- 667MHz
- 2
- 256MB
- 533MHz